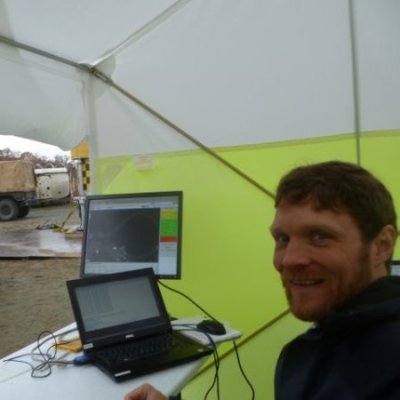
Richard Wise serves as a Principal Research Engineer within the Autonomy Systems Group at Scientific Systems, where he spearheads the design, implementation, and field testing of cutting-edge autonomy software for various Unmanned Vehicles (UxVs). With a robust background in applied control theory and systems engineering,...
Richard Wise serves as a Principal Research Engineer within the Autonomy Systems Group at Scientific Systems, where he spearheads the design, implementation, and field testing of cutting-edge autonomy software for various Unmanned Vehicles (UxVs). With a robust background in applied control theory and systems engineering, Richard has cultivated a diverse skill set that encompasses low-level sensor integration, platform-level automation, and mission-level coordination. His expertise is critical in advancing the capabilities of UxVs, ensuring they can operate effectively in complex environments.
Currently, Richard is a key technical advisor for the SESU program, where he plays a pivotal role as the lead author in developing innovative multi-vehicle cooperative search strategies and Time Difference of Arrival (TDOA) localization position optimization behaviors. His work in this area not only enhances the operational efficiency of UxVs but also contributes to the broader field of autonomous systems by enabling more effective multi-agent coordination.
Additionally, Richard is the lead author and architect behind the Collaborative Mission Autonomy (CMA) software framework. This groundbreaking initiative is designed to facilitate robust, generic, and multi-vehicle cooperative tasking, allowing for seamless collaboration among UxVs. One of the notable CMA-enabled projects includes a cooperative coverage search that has been successfully flight-tested using two UxVs, demonstrating the practical applications of his research.
With a strong foundation in route planning, software development, and test engineering, Richard continues to push the boundaries of autonomy systems, leveraging his skills in pattern recognition, simulations, and signal processing to drive innovation in the field. His contributions not only enhance the capabilities of UxVs but also pave the way for future advancements in autonomous technology.